Referencing Simulink Configurations¶
Introduction¶
The Simulink configuration stores settings for simulation and code generation of a .slx model. Configuring it well is a fundamental part of any modeling in Simulink, given that the wrong settings may yield unreliable simulation results (for example a too crude solver skipping over fast dynamics) or errors. In the context of PCSSP, we typically have the following use case:
PCS modules executing in discrete-time at a fixed rate, for example a PID controller
Slow continuous dynamics, for example gas injection
Fast (plasma) dynamics described by stiff (partial) differential equations
Nonlinearities such as transport delays
Event-driven modules that are executed only when triggered
The sample time of a module is a parameter that indicates when, during simulation, the block produces outputs and if appropriate, updates its internal state. For modules containing continuous states, this differs from the internal numerical solver time step, which may vary to optimize the accuracy of the simulation result. For fully discrete models like the PCS modules, the sample time is equal to the solver time step (Simulink does that automatically when the latter is left on auto). Often, a PCS module will have a much larger sample-time than the numerical solver time step that is required for accurate simulation of the continuous plasma dynamics. Simulink therefore supports multi-rate simulations in which each module may have its own sample time, or may be executed on the basis of an external trigger.
In addition to the solver selection and continuous/discrete time considerations, the Simulink Configuration controls archiving, code generation policies, warnings/errors, etc. PCS modules will have massively different requirements compared to plant models, and requirements may differ in which context the module is used. To this end PCSSP implements configuration references. Each slx module always points to a configuration reference called configurationSettings, whose content is updated at will to configure the model for code-generation, simulation, assessment, etc. These configuration settings are stored in their own dedicated data dictionary container located in the /configurations/ directory in the root of the repository. When initializing or calling the sim method of a pcssp module, the framework takes the pcssp_simulation configuration settings, and stores them as configurationSettings in the base workspace. However, when calling the build-method to generate code for a module, configurationSettingsRTFcpp is called and put in the base workspace with the very same variable name configurationSettings.
In addition, PCSSP top models can point to a configurationSettingsTop simulation reference, that contains more relaxed requirements and a continuous time solver, allowing faster and more accurate simulations of stiff problems in plasma models.
Note
The slx model should always point to settings called configurationSettings (or configurationSettingsTop for top-models) in the base workspace of Matlab. PCSSP takes care of updating the content of those settings when building or simulating the model
Settings for simulations¶
The pcssp_simulation configuration sets up a continuous time solver for the model to allow accurate simulation of nonlinearities and fast dynamics. Typically, however, a (deployed) PCS module requires discrete sample times. In pcssp, we therefore constrain the input port(s) of PCS modules to force a certain sample time. ‘This can be easily configured in the block parameters of the input port. Please refer to the module developer’s guide PCSSP Modules to learn how.
Settings for code generation¶
Code generation of a PCS module may require, but is not limited to:
full discrete time with no continuous states
I/O ports with explicit signal names and data types definitions via non-virtual bus objects
Disabling errors concerning archiving
Enabling errors concerning variable-sized signals, or complex signals etc.
In collaboration with the RTF team we recommended a set of Simulink Configuration settings that we have stored under configurationSettingsRTFcpp (for generating c++ code). When calling the obj.build('rtf') method these settings are stored in the base workspace.
Pointing to the configuration reference¶
Out of the box, Simulink will use generic configuration Settings that are as flexible as they can be to support a wide number of cases. These settings are implicitly stored together with the slx model in the ‘Configurations’ menu of the Model explorer. Instead, after saving a new model, you need to point to the pcssp configuration settings as follows:
Model Explorer → Configurations → Add → Configuration Reference → Point to the configurationSettings that are already in the base Workspace (provided you have initialized the module/module already). Then, right click on the new reference and select activate. Without this last step, the model still uses the stock configuration settings. In principle you can delete those by pressing delete on your keyboard.
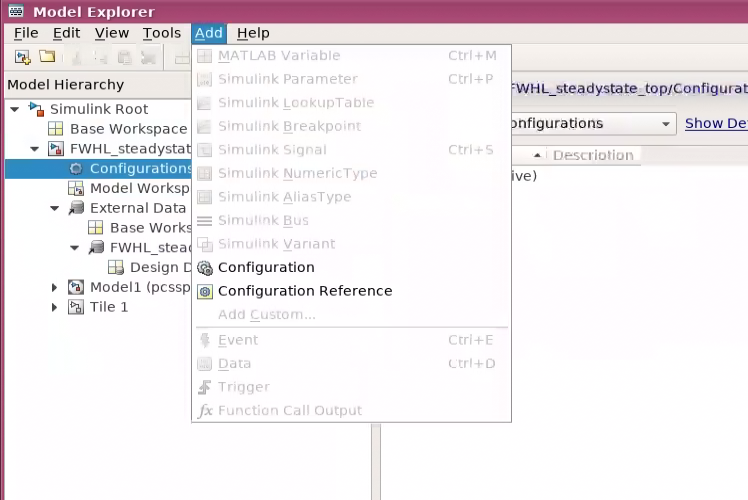
Step 1: Add a configuration reference in the model explorer¶
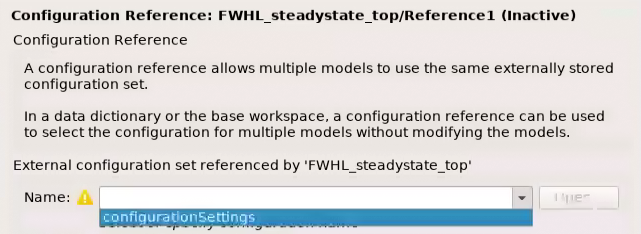
Step 2: point to the configurationSettings variable in the base workspace¶
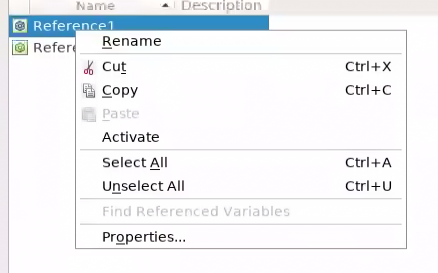
Step 3: activate the configuration reference¶
Configuration References in a model hierarchy¶
In principle, each model in a hierarchy of referenced models will have its own configuration settings when running the model in standalone mode. However, when referencing the model, Simulink typically overwrites most of these settings. In that case Simulink propagates the solver settings of the top model to all referenced models (see here). Note that these settings are different from the sample time (block execution): the model is always executed at the Sample Time specified in the ports. In addition, Simulink may allow a local solver in situations where continuous dynamics of a references model are of a vastly different time scale. But this is only ever useful for some simulation proposes, since PCS modules will never contain continuous states.
With respect to configuration references in PCSSP hierarchies we therefore adopt the following:
The top model refers to a forgiving configurationSettingsTop with continuous time solver
The PCS modules may refer to configurationSettings for code generation or simulation
All ports in the models should specify sample times to make sure Simulink interpolates correctly when necessary
When done correctly, we obtain a situation like in the figure below, showcasing how continuous time modules are automatically interpolated to allow communication to fully discrete PCS modules.
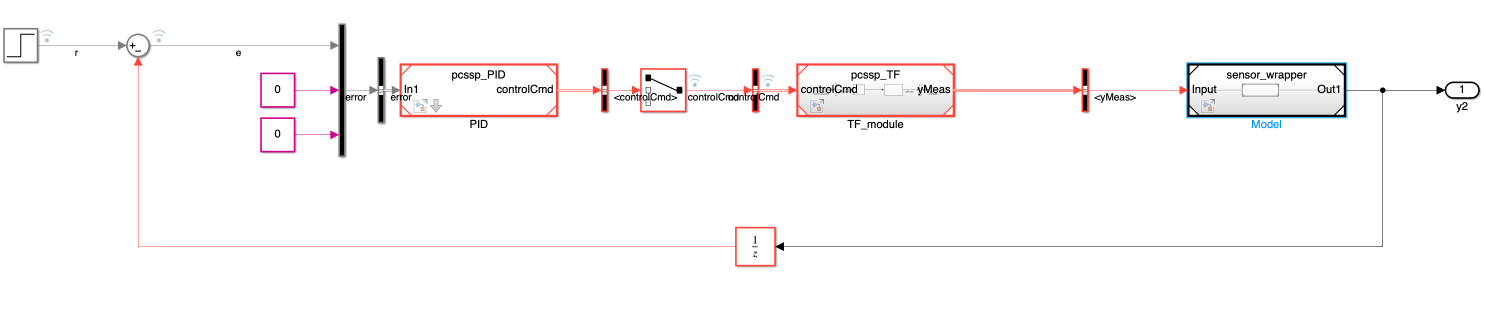
Multi-rate execution of referenced models in a PCSSP top model environment.¶
